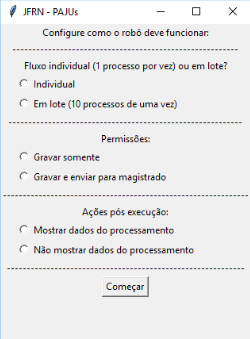
Nessa sprint foram aprimorados os modelos de automação apresentados na entrega anterior. Para a solução da 6ª vara (preenchimento de decisão inicial) foi criada a interface de configuração para que o usuário possa escolher se deseja que o robô preencha decisões individualmente ou em lote, bem como se deverá ou não enviar automaticamente para o magistrado. Também, aumentou-se a abrangência da solução para ler petições de outros órgãos exequentes. Com relação ao robô para preenchimento de RPV, foi desenvolvida a navegação no sistema CRETA e o preenchimento do primeiro tipo de RPV.